近日,实验室关于具身视觉目标导航的工作“HOZ++: Versatile Hierarchical Object-to-Zone Graph for Object Navigation”(作者:张思贤,宋新航,余欣瑶,白宇兵,郭鑫龙,黎维婕,蒋树强)被T-PAMI接收。T-PAMI全称为IEEE Transactions on Pattern Analysis and Machine Intelligence, 是模式识别、计算机视觉及机器学习领域的主流国际期刊, 2024年公布的影响因子为20.8。
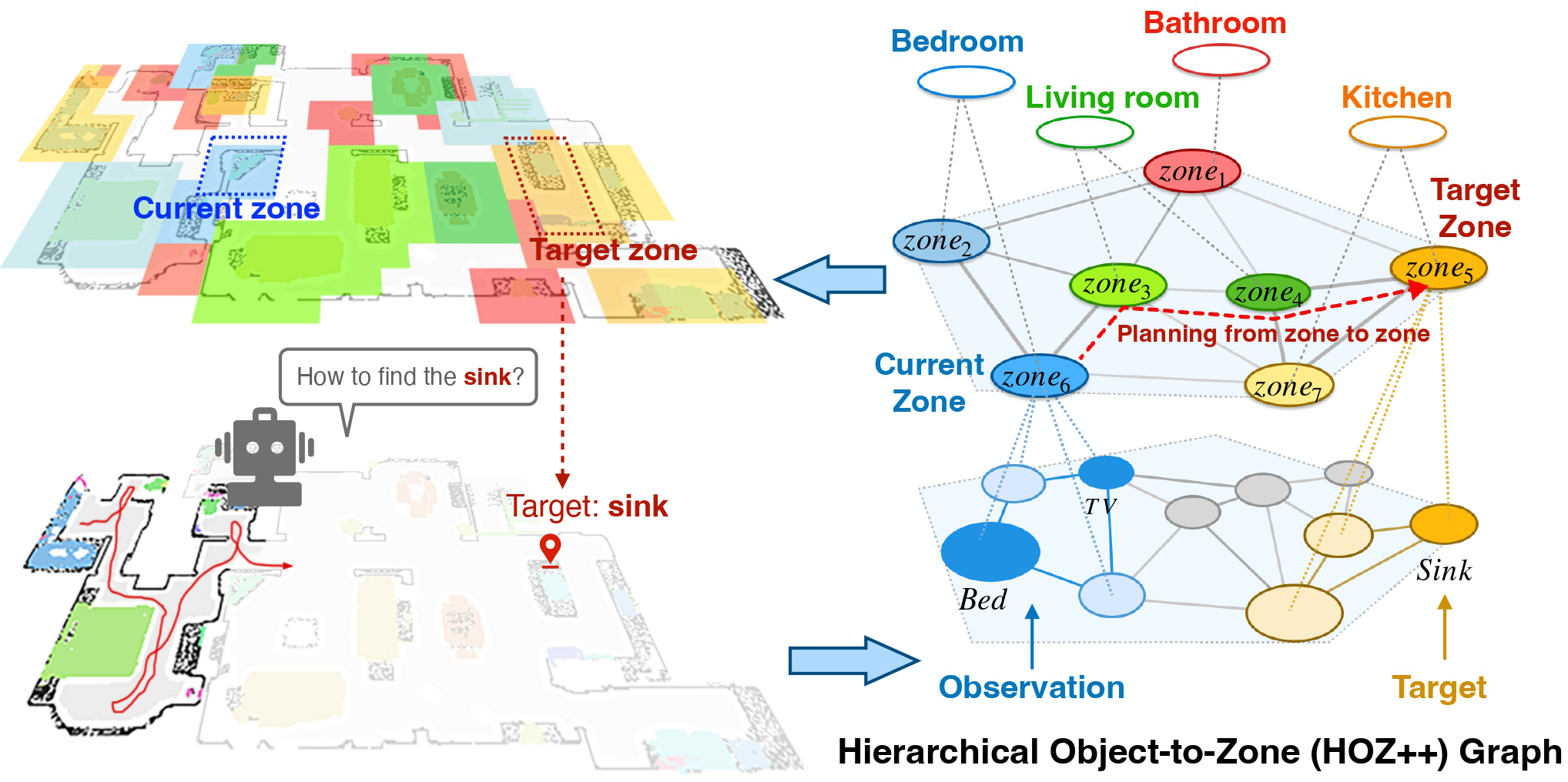
物体导航任务的目标是在未知环境中利用视觉信息导航到目标物体。以往研究通常采用深度模型建模智能体,通过强化训练使其基于视觉观察决策导航行为。然而,尽管经过大量训练,这些智能体在未知环境中当目标不可见时,往往难以做出明智的决策。相比之下,人类即便身处未知环境,仍能展现出卓越的导航能力。这种能力归因于海马体中的认知地图,它使人类能够在导航过程中回忆类似情境下的过往经验,并预测未来可能发生的情况。同时,认知地图能够根据对未知环境的新观察进行动态更新,为人类提供丰富的先验知识,从而显著提升其导航能力。受人类导航机制的启发,我们提出了多层级物体-区域(Hierarchical Object-to-Zone, HOZ++)图,该图模型捕捉了物体、区域及场景之间的规律性。HOZ++图能够帮助智能体识别当前区域及目标区域,并计算二者之间的最优路径,然后选择路径上的下一个区域作为智能体的导航指引。此外,HOZ++图能够基于新环境中的实时观察进行持续更新,从而增强其对新环境的适应性。HOZ++图可无缝集成至现有方法中,包括端到端强化学习(RL)方法和模块化方法。我们在四个仿真环境(AI2-THOR、RoboTHOR、Gibson 和 Matterport 3D)上对所提方法进行了评估。此外,我们还构建了一个现实环境,以验证该方法在真实世界中的适用性。实验结果验证了提出的方法在导航任务上的有效性和高效性。
附件: